- Введение
- Продукция
- Маркировка
- Функции
- Руководство пользователя
- О документации
- Меры безопасности
- Индикация
- Максимальная конфигурация
- CAN-топология
- Подключение CAN-шины
- Разъемы и провода
- Монтаж модулей
- Общие правила и нормы эксплуатации
- Технические характеристики
- Условия эксплуатации
- Использование по назначению
- Маркировка
- Техническое обслуживание
- Транспортирование и хранение
- Упаковка
- Гарантийные обязательства
- Обновление
- Платформа CAN bp.
- CANopen
- ISOBUS (ISO 11783)
- Решения
- Исследования
- Параметризация
- Программирование
- Литература и источники
- Образование
- Дополнительная информация
- Цифровые решения для современного сельского хозяйства
Система на модуле (SoM)¶

Модель |
|
|---|---|
Система на модуле (SoM) |
iA 801x |
Обзор модулей¶
SoM iA 8010 обеспечивает мгновенный доступ к технологии CANopen, упрощая процесс внедрения устройств. Специальная SoM (система на модуле) уже готова для реализации всего протокола связи CANopen с профилями CiA и утилитами для конфигурации и отладки.
Что такое SoM?
SoM (System on Modules) Система на модуле, представляет собой единый физический встроенный модуль, интегрированный в системную функцию, который содержит основные компоненты, интерфейсы связи и интегрированное программное обеспечение, могут быть подключены к несущей плате для встроенной системы.
Преимуществами SoM являются экономия времени при разработке, персонализацию конфигураций, упрощение и сокращение стоимости разработки.
Мгновенный доступ к технологии
Мгновенный доступ к CANopen для вашего встроенного устройства
SoM iA 8010 — это концепция, разработанная ioot pro, которая помогает вам легко создавать устройства CANopen. Готовые приложения для доступа, тестирования или управления устройствами/узлами, подключенными к сети CANopen. Создавайте датчики, исполнительные механизмы или другие устройства с интерфейсом CANopen.
Функции и особенности¶
Дополнительные опции¶
защитное покрытие платы
управления движением (в соответствии с CiA ® 402)
обеспечение безопасности связи (в соответствии с CiA ® 304)
Основные преимущества¶
Пониженный уровень сложности
Повышенный уровень безопасности
Ускоренный выход на рынок
Экономия времени и средств
Высокий уровень совместимости
Работа в жестком реальном времени
Готовые приложения для доступа, тестирования или управления
Система на модуле (SoM)¶
SoM iA 7010 реализует протокол CANopen, соответствующий стандартам CiA. iA 8010 основан на 32-битном микроконтроллере Cortex M4. Производная версия со встроенным приемопередатчиком CAN используется для минимизации количества внешних компонентов, необходимых для чипа протокола. Архитектура Cortex в сочетании с оптимизированным дизайном прошивки обеспечивает очень высокую производительность. Задержки между исходящими CAN PDO и аппаратными событиями сокращены до 15 микросекунд.
Это высокопроизводительное и готовое к использованию решение CANopen доступно в виде модуля. Модуль реализует генерацию тактового сигнала, память для хранения данных конфигурации и два светодиода для сигнализации состояния CANopen. Для ознакомления с iA 7010 достаточно только самого модуля, питание и конфигурация доступна через USB C а для подключения шины достаточно припаять любой разъем с шагом 2.54 мм.
Записи в словаре объектов, порты ввода-вывода, а также поведение SDO и PDO настраиваются с помощью простого инструмента настройки в открытом доступе, так же реализована возможность управлять модулем через WEB приложение с открытой библиотекой для создания собственных страниц приложения.
Блок схема модуля SoM iA 8010

Варианты применения¶
Единая платформа ioot-pro на базе CANopen применяется в двух вариантах:
В автономном виде
В качестве сопроцессора
Автономный¶
В этом варианте устройство строится на одном SoM модуле в котором реализован стэк протокола CANopen с верхне уровневыми профилями CiA для управления сетью и словарем объектов, к модулю добавляются аналоговые схемы физического уровня в зависимости от назначения устройства. Эта реализации обеспечивает самую быструю разработку, поскольку модуль напрямую реализует законченные устройства CANopen.
На приведенной выше блок-схеме показаны компоненты автономной системы CANopen. Система на модуле включает все необходимые программные функции CANopen. Так же в модуле реализован блок PLC МЭК-61131 для логических диаграмм. USB для обновления приложения и отладки работы.
Дополнительные аналоговые компоненты высокого разрешения могут быть доступны через интерфейс SPI или I2C.
При разработке устройства с применением SoM в автономным виде можно сосредоточиться на предоставлении конкретных цифровых и аналоговых схем для входов и выходов, поскольку все пакеты CANopen полностью обрабатываются SoM модулем.
Сопроцессор¶
В виде сопроцессора SoM модуль является сопроцессором другого процессора или микроконтроллера «хост-контроллера». Хост-контроллер служит для выполнения специфичных пользовательских задач, например:
WEB интерфейс
Ethernet
Управление дисплеем
Различные протоколы интеграции
Работа с G-кодом для устройств с числовым программным управлением (ЧПУ)
Работа с дисплеем или камерой
Все задачи хост-контроллера не требуют жесткого реального времени, а связь M2M осуществляется в режиме RT между SoM модулями. Связь между хост-контроллером и SoM модулем может быть реализована через последовательный канал (обычно UART, опционально I2C или SPI). Конфигурация устройств осуществляется с помощью пакета программного обеспечения и специальных утилит настройки.
При разработке устройства с применением SoM в виде сопроцессора необходимо сосредоточиться на предоставлении конкретных цифровых и аналоговых схем для входов и выходов, а так же написание приложения для хост-контроллера. Для связи с модулем предоставляются все необходимые библиотеки. Хост-контроллер может получить доступ к словарю объектов CANopen устройства, используя простой командный язык.
Таким образом, связь по последовательному каналу включает в себя:
События в шине CAN, о которых модуль сообщает хосту
Данные SDO (данные записаны в локальный словарь)
Используется для контроля изменений в сети (найдены/потеряны узлы)
Используется для индикации запросов мастера сетевого управления (сброс, изменение статуса работы).
Основные команды от хоста к CANopen:
Чтение данных из записи локального словаря объектов.
Запись данных в локальный словарь объектов (генерирует PDO, зависит от конфигурации)
Расширенные команды от хоста к CANopen (только для Manager или CiA 447)
Чтение данных из записи словаря объектов любого узла (клиентом SDO)
Запись данных в запись словаря объектов любого узла (клиентом SDO)
Параметризация¶
Модули могут обладать различными свойствами. Свойства модулей можно устанавливать посредством параметризации.
Инструменты для параметризации¶
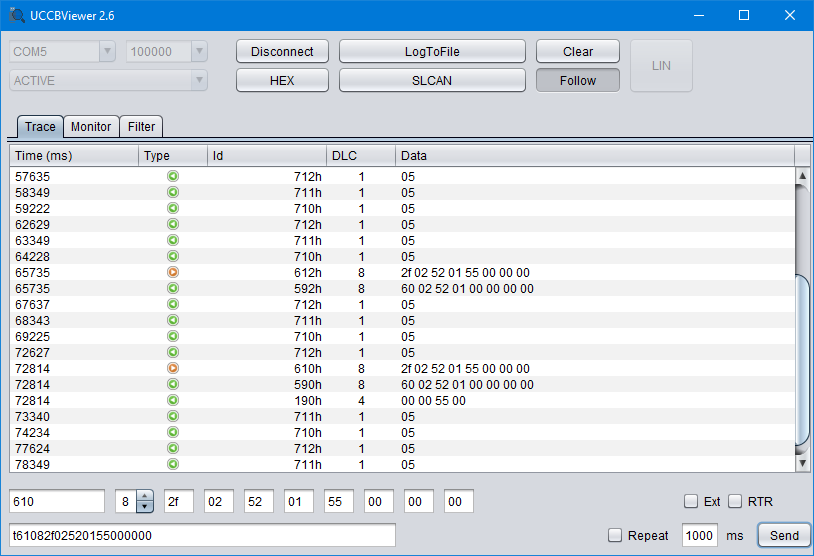
Программа работает на Windows, Linux, MacOS. Параметризация модулей производится в UCCBViewer Параметризация должна выполняться в режиме «ПРЕДРАБОТАЮЩИЙ». После установки всех параметров сохраните параметры в энергонезависимой памяти устройства.
Примечание
Ознакомьтесь с разделом Параметризация
Программирование¶
В каждый модуль платформы CAN bp может быть интегрирована уникальная логика работы. Данные, представленные в этом разделе, касаются инструментов для создания и тестирования пользовательских логических приложений.
Инструменты для программирования¶
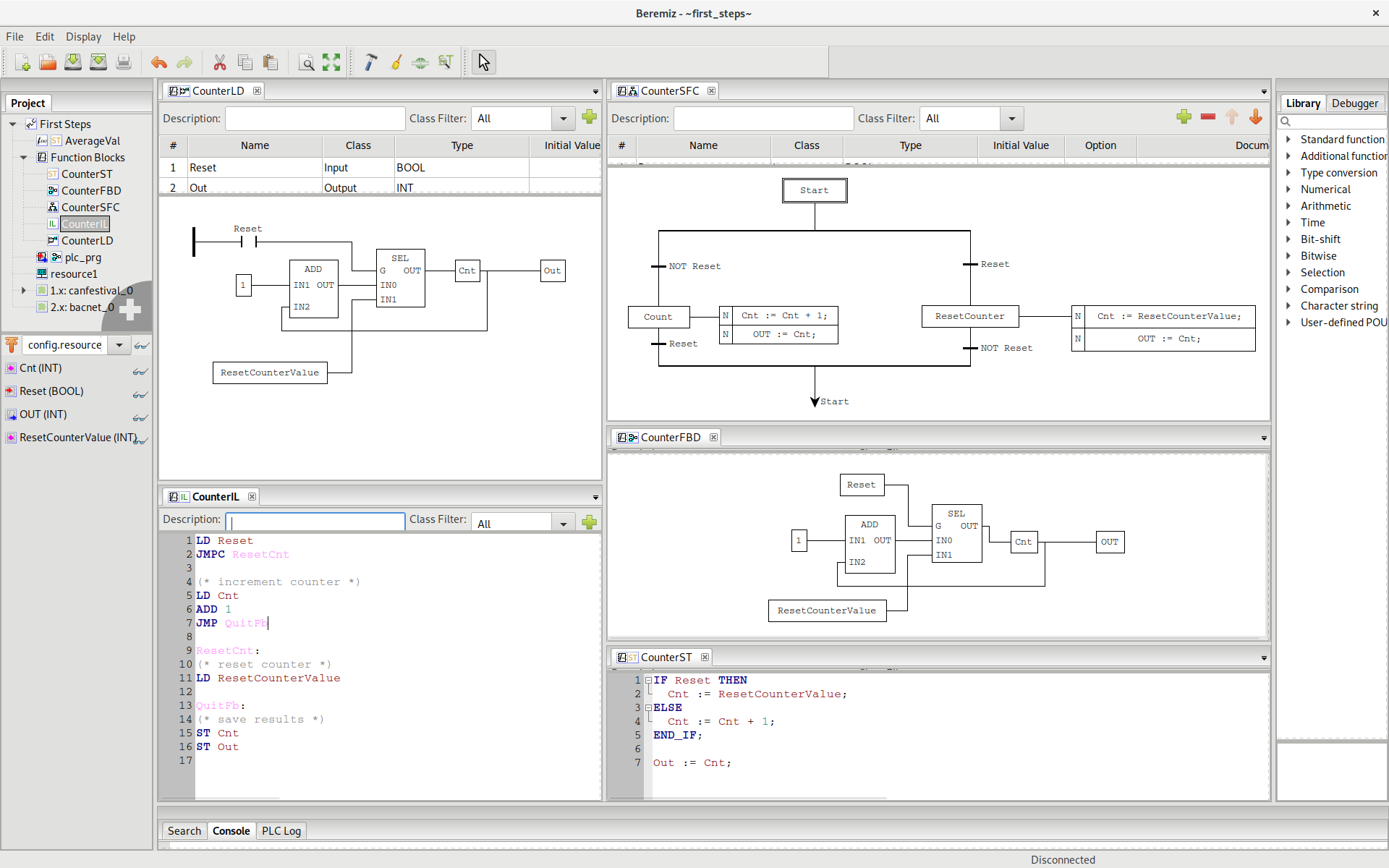
Программа работает на Windows, Linux, MacOS. Программирование модулей пользовательской логикой возможно через TOOL PRO в соответствии со стандартом IEC 61131-3 Входными данными являются программные модули, написанные пользователем (в большинстве случаев инженером по автоматизации) на текстовых (ST, IL) и/или графических (FBD, SFC, LD) языках
Примечание
Ознакомьтесь с разделом Программирование
Диагностика¶
Модуль обладает аппаратными и программными базовым диагностическим свойствам.
К аппаратной диагностике, относятся отображение ошибок посредством светодиодов.
Программная диагностика подразумевает передачу сообщений о состоянии модуля в CAN сеть.
Примечание
Ознакомьтесь с разделом «Диагностика» doc.ioot.pro