- Введение
- Продукция
- Маркировка
- Функции
- Руководство пользователя
- О документации
- Меры безопасности
- Индикация
- Максимальная конфигурация
- CAN-топология
- Подключение CAN-шины
- Разъемы и провода
- Монтаж модулей
- Общие правила и нормы эксплуатации
- Технические характеристики
- Условия эксплуатации
- Использование по назначению
- Маркировка
- Техническое обслуживание
- Транспортирование и хранение
- Упаковка
- Гарантийные обязательства
- Обновление
- Платформа CAN bp.
- CANopen
- ISOBUS (ISO 11783)
- Решения
- Исследования
- Параметризация
- Программирование
- Литература и источники
- Образование
- Дополнительная информация
- Цифровые решения для современного сельского хозяйства
Общие правила¶
В процессе проектирования любой системы важно определить общие требования, включая количество и расположение точек ввода/вывода, а также выбор соответствующих модулей. Необходимо также оценить время отклика, пропускную способность, расстояние и количество узлов связи, а также тип соединений.
Основное внимание в этом разделе уделяется настройке связи между устройствами, поэтому предполагается, что все необходимые алгоритмы управления для ПЛК уже реализованы.
Предупреждение
Для настройки модулей необходимо иметь общие знания о протоколе CANopen и CAN интерфейсе. Ознакомьтесь с данным разделом для получения базовой информации.
При проектировании системы с использованием платформы CAN bp и других CANopen устройств следует учитывать следующее:
Совместимость устройств¶
Устройства должны поддерживать один и тот же физический уровень и быть совместимыми в соответствии со стандартом CiA 301 V4.02. Некоторые устройства могут иметь несколько вариантов ввода-вывода (например, различное выходное напряжение или ток), и эти характеристики должны быть определены и настроены до подключения датчиков и исполнительных механизмов. Устройства сторонних производителей, такие как датчики с интерфейсом CANopen, могут быть легко интегрированы при условии, что они соответствуют указанным выше требованиям.
Выбор идентификаторов узлов¶
Каждый узел в системе имеет уникальный идентификатор от 1 до 127. Этот идентификатор определяет приоритет сообщений от данного узла. Узлам с более высоким приоритетом назначаются более низкие идентификаторы. Модули с входами/выходами (например, датчиками положения или приводами) получают более низкий идентификатор, а узлы с входами/выходами, подключенными к более медленным процессам (например, температурным датчикам), получают более высокий идентификатор.
Скорость интерфейса¶
Все устройства в CANopen сети должны поддерживать одну и ту же скорость передачи данных. Максимальная возможная скорость зависит от длины шины и отводов, как указано в стандарте CiA 305-1. Рекомендуется не использовать более высокую скорость передачи данных, чем это необходимо, так как это снижает электромагнитные помехи, увеличивает стабильность и общую производительность системы.
Операции синхронизации¶
Если приложению требуется точное время или его часть (например, для управления движением), в CANopen используется механизм SYNC. В зависимости от количества синхронизируемых PDO, использование SYNC может вызвать значительный пик передачи, так как синхронизированные PDO передаются после получения сообщения SYNC.
Коммуникации и защита¶
Определите связь и соединения (PDO) для всех участвующих устройств:
Соединения главный-подчиненный
Подчиненные соединения
Защита устройств и сети, проблемы управления (например, сердцебиение)
Оценка пропускной способности¶
Без моделирования рассчитать пропускную способность CANopen довольно сложно, но можно примерно оценить использование пропускной способности:
Рассчитать количество передаваемых байтов данных, например на каждый цикл синхронизации.
32 Digital inputs (BYTE) → 4 bytes
4 Analog inputs (INT) → 8 bytes
8 Digital outputs (BYTE) → 1 byte
Итого: 13 bytes
Рассчитать необходимую пропускную способность на основе времени цикла связи или наихудшего сценария.
Подсказка
При расчетном времени цикла синхронизации 13 мс и 13 байтах данных, за секунду передается около 1000 байт. Умножим на 8 (для достижения битов в секунду) получается 8 кбит/с.
Рассчитать общую пропускную способность с учетом того, что сообщения CAN содержат не только данные, но и служебную информацию, такую как идентификатор, контрольные биты, контрольную сумму и др.
К сожалению, не существует простого правила, описывающего отношения между данными и накладными расходами. Коэффициент накладных расходов может варьироваться от 2 до 6 в зависимости от длины сообщения. Если используются много коротких сообщений, коэффициент примем равный 6.
Подсказка
Если предположить, что коэффициент накладных расходов равен 4, это приведет к пропускной способности
4*8кбит/с = 32 кбит/с
При выбранном битрейте 125 кбит/с среднее использование полосы пропускания является:
32кбит/с/125кбит/с => 25,6%
Около 25% — это приемлемый запас для приблизительной оценки. В случае выбранной скорость передачи данных 50 кбит/с, требуется более подробная информация для расчета.
Выбор устройств и инструментов¶
После того, как требования установлены, вам, вероятно, потребуется выбрать устройства и инструменты, используемые для настройки и тестирования устройств и сети.
Подсказка
Доступ к параметрам можно получить следующими способами:
Через SDO команды отправляемые через USB модуля, данным способом можно получить доступ к всему словарю это наиболее гибкий способ настройки модуля, для подключения.
Через SDO команды WEB интерфейса, данным способом можно получить доступ к всему словарю но необходимо что бы в сети CAN был модуль с WEB интерфейсом.
Через SCADA PromUC, самый удобный способ но ограничен только наиболее востребованными объектами словаря и так же необходимо, что бы в сети CAN был модуль с WEB интерфейсом.
Далее в документации будет рассматриваться способ параметризации через SDO команды, так как таким образом можно читать и изменять любые параметры устройства. Метод отправки команд SDO через приложение на компьютере подключенный через USB к модулю или через WEB интерфейс схожи и здесь не разделяются.
Параметризация¶
Модули могут обладать различными свойствами. Свойства модулей можно устанавливать посредством параметризации.
Инструменты для параметризации¶
Программа работает на Windows, Linux, MacOS. Параметризация модулей производится в UCCBViewer Параметризация должна выполняться в режиме «ПРЕДРАБОТАЮЩИЙ». После установки всех параметров сохраните параметры в энергонезависимой памяти устройства.
Примечание
Ознакомьтесь с разделом Параметризация
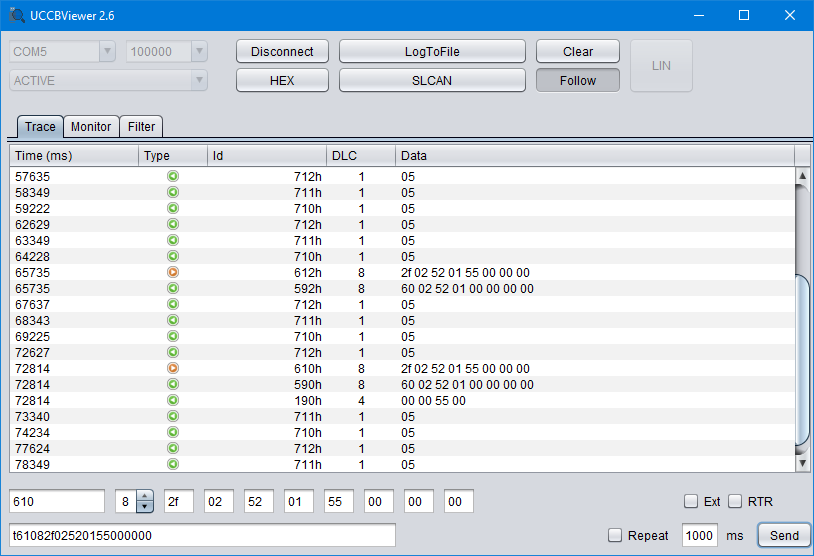
Команды SDO вводятся в нижней части приложения, ответ от устройства смотрите в окне терминала сети CAN, если сообщений много есть возможность ввести фильтр, что бы выводить сообщения только от нужных устройств.
В данном разделе приведены примеры запросов в следующем виде:
COB-ID |
DLC |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|---|---|---|---|---|---|---|---|---|---|
600 + NodeID |
[8] |
2f |
02 |
52 |
01 |
55 |
00 |
00 |
00 |
Таблица соответствует окну ввода SDO запроса в приложении и WEB интерфейсе. Графический интерфейс SCADA здесь не рассматривается и описан отдельно.