- Введение
- Продукция
- Маркировка
- Функции
- Руководство пользователя
- О документации
- Меры безопасности
- Индикация
- Максимальная конфигурация
- CAN-топология
- Подключение CAN-шины
- Разъемы и провода
- Монтаж модулей
- Общие правила и нормы эксплуатации
- Технические характеристики
- Условия эксплуатации
- Использование по назначению
- Маркировка
- Техническое обслуживание
- Транспортирование и хранение
- Упаковка
- Гарантийные обязательства
- Обновление
- Платформа CAN bp.
- CANopen
- ISOBUS (ISO 11783)
- Решения
- Исследования
- Параметризация
- Программирование
- Литература и источники
- Образование
- Дополнительная информация
- Цифровые решения для современного сельского хозяйства

Применение CAN bp¶
Масштабируемая программно-аппаратная платформа CAN bp на базе CANopen предназначенная для поддержки приложений в области управления технологическим процессом. Платформа одинаково хорошо подходит для модулей распределенного управления, цифровых датчиков а так-же в качестве модуля связи для производительных процессоров с модулями ввода-вывода и исполнительными механизмами.
Платформа в себя включает:
32-битный микроконтроллере ARM® Cortex®-M4 MCU 96 MHz
интегрированную среду выполнения
стек протоколов CANopen соответствующие стандарту CiA 301
протоколы SDO и PDO
протокол SYNC, Heartbeat и Emergency
протокол контроля ошибок
поддержка сетевого управления (NMT Master) согласно CiA 302
профиль устройства для универсальных модулей ввода-вывода согласно CiA 401
средства параметризации и разработки пользовательской логики в соответствии с МЭК-61131
С основными характеристиками:
поддерживает все скорости передачи данных CANopen до 1 Мбит/с.
протокол CANopen и объектный словарь реализованы во флэш-памяти
до четырех объектов данных процесса передачи (TPDO)
до четырех объектов приема данных процесса (RPDO)
до шестнадцати объектов связи данных процесса (RPDO)
типы передачи, настраиваемые с помощью доступа SDO к словарю объектов
быстрое время отклика до 15 мкс благодаря оптимизированной для архитектуры реализации CANopen.
внутренний преобразователь АЦП, разрешение 12-bit.
USB Type C для параметризации и диагностики шины CAN
UART для связи с хост-контроллером в режиме сопроцессора
Кнопка для сброса параметров и изменения режима работы
SPI с поддержкой внешних цифро-аналоговых и аналого-цифровых преобразователей.
I2C для подключения цифровых датчиков
Платформа CAN bp на базе CANopen применяется в двух вариантах:
В автономном виде
В качестве сопроцессора
Автономное применение¶
В этом варианте устройство построено на базе платформы CAN bp где реализован стэк протокола CANopen с верхне уровневыми профилями CiA для управления сетью и словарем объектов, дополнительно добавляются схемы физического уровня в зависимости от назначения устройства.
На приведенной выше блок-схеме показаны компоненты автономного применения платформы CAN bp. Система включает все необходимые программные функции CANopen. Так же в каждом устройстве реализован блок PLC МЭК-61131 для логических диаграмм. USB для обновления приложения и отладки работы.
Существует широкая линейка устройств с применением платформы CAN bp в автономном виде. Так же возможно быстро создавать дополнительные устройства на базе SoM модуля.
Примеры устройств ioot pro основанных на платформе CAN bp в автономном виде:
Электронные модули (цифровые, аналоговые)
Силовые модули (релейные, с измерением параметров)
Измерительные
Малогабаритные
Кнопочные панели
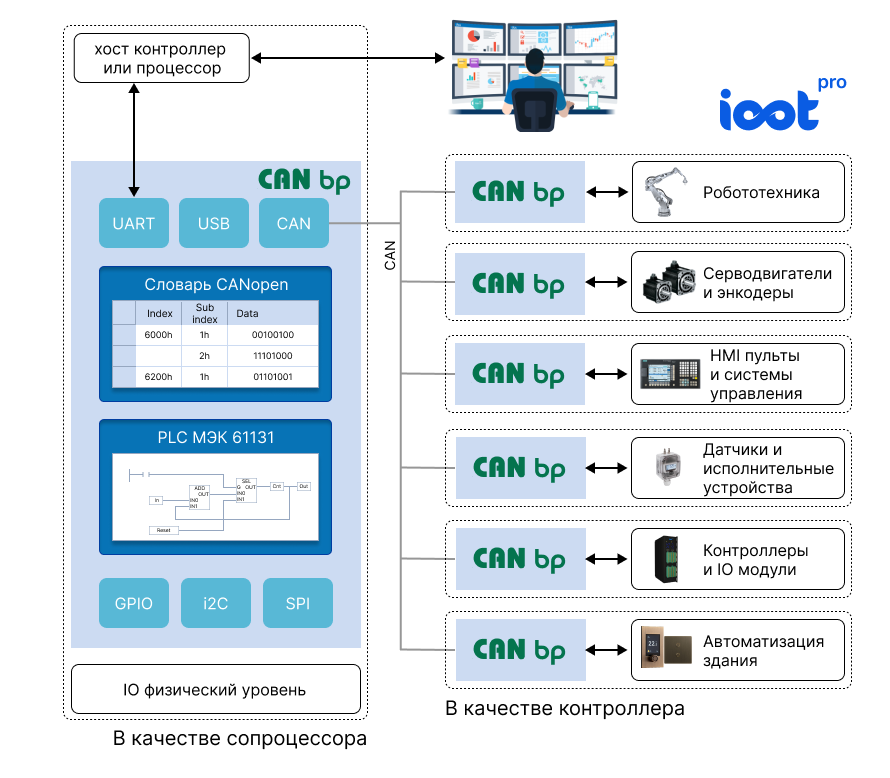
В качестве сопроцессора¶
В некоторых устройствах платформа CAN bp является сопроцессором другого процессора или микроконтроллера «хост-контроллера». Хост-контроллер служит для выполнения специфичных пользовательских задач, например:
WEB интерфейс
Ethernet
Управление дисплеем
Различные протоколы интеграции
Работа с G-кодом для устройств с числовым программным управлением (ЧПУ)
Работа с дисплеем или камерой
Все задачи хост-контроллера не требуют жесткого реального времени, хост-контроллер обменивается данными с платформой CAN bp которая в свою очередь поддерживает связь с другими узлами в режиме жесткого реального времени по шине CAN. Конфигурация устройств осуществляется с помощью пакета программного обеспечения и специальных утилит настройки таким же образом как и при автономном применении платформы CAN bp.
Хост-контроллер может получить доступ к словарю объектов CANopen используя простой командный язык. Причем не обязательно к сопроцессору, а к любому узлу на шине CAN через модуль сопроцессора основанного на платформе CAN bp. Хост-контроллер общается с одним из сопроцессоров шины и далее ему доступны все устройства сети CAN. Это происходит благодаря протоколу связи Хост-контроллер и модулем CAN bp соединенного с CAN шиной.
Таким образом, между сопроцессорами происходит обмен данными которые включают в себя:
События в шине CAN, о которых сопроцессор сообщает хосту
Данные SDO (с возможностью чтения и записи словаря любого узла шины)
Данные для контроля изменений в сети (найдены/потеряны узлы)
Данные для сетевого управления (сброс, изменение статуса работы всех узлов сети).
Хост-контроллер может иметь следующие обязанности:
обнаружение подключения и отсоединения устройств;
манипулирование потоком управления между устройствами и хостом;
сбор статистики;
ввод параметров;
сбор параметров;
управление сетью;
управление устройствами;
нумерации и конфигурации устройств;
изохронных передач данных;
асинхронных передач данных;
управления энергопотреблением;
информации об управлении устройствами и шиной.
Чтение данных из записи локального словаря объектов.
Запись данных в локальный словарь объектов (генерирует PDO, зависит от конфигурации)
Расширенные команды от хоста к CANopen (только для Manager или CiA 447)
Чтение данных из записи словаря объектов любого узла (клиентом SDO)
Запись данных в запись словаря объектов любого узла (клиентом SDO)
События в шине CAN, о которых модуль сообщает хосту
Данные SDO (данные записаны в локальный словарь)
Используется для контроля изменений в сети (найдены/потеряны узлы)
Используется для индикации запросов мастера сетевого управления (сброс, изменение статуса работы).
Хост-контроллер зачастую используется для связи данных CANopen устройств с сетью Ethernet. А так же для обработки G-кода в системах управления движением.
Примеры устройств ioot pro основанных на платформе CAN bp в качестве сопроцессора :
Интерфейсные модули (конвертер CAN, сервер модуль, контроллер движения)
Релейные блоки управления (РБУ)
Панели управления с дисплеем